| Hauptseite
-> Altes --> Technisches Tauchen in der DDR ---> Amateurkonstruktion eines zweistufigen Atemreglers Dipl.-Ing.
Karel Spacek und Jaroslav Sebestik (CSSR), POSEIDON 1964 |
|
| Das Übertragungsverhältnis Nach Bild 3 ist das Verhältnis im aufgezeichneten Augenblick aus den Momentgleichungen zu den Drehpunkten der Hebel: in unserem Falle P/x = b•c/a•d P/x = 8•14/44•22 Dieses Verhältnis gilt mit genügender Beiläufigkeit bei allen Stellungen der Hebel und mit diesem Verhältnis wird weitergerechnet. Hub des Verschlußkörpers und der Membrane Die Membrane muß eine so große Durchbiegung erlauben, daß für den Hub die Gleichung F1 = F2 gilt: F/4 = d • h, h= 4 F1 Fläche des Düsendurchmessers F2 Fläche des gedachten Zylindermantels, der entsteht, wenn der Versch1ußkörper um die Höhe h vom Ventilsitz abgehoben wird. Für unseren Fall: h = 3/4 = 0,75 mm Wenn P/x = 1/9 ist, dann ist die Membrandurchbiegung M = 0,75•9 = 6,75 mm. Eine Gummi- oder gummierte Leinwandmembrane ermöglicht diesen Hub gut, obzwar es zu dieser Hubhöhe meistens gar nicht kommt, da die durchströmende Luftmenge reichlich überdimensioniert ist. Kraftverhältnisse im Hebelmechanismus der zweiten Stufe (Bild 3) Bei den Hebeln gehen wir von der Voraussetzung aus, daß durch entsprechende Konstruktion ihr Schwerpunkt im Drehpunkt liegt. 1. Die Momentbedingung zum Drehpunkt des oberen (primären) Hebels. Gleichung 1: P•a–y•b = 0 a) P = fm•p +- G fm = aktive Fläche der Membrane des Lungenautomaten fm = d2/4; D = 100mm p = Unterschied des Wasserdruckes und des beim Einatmen im Lungenautomaten entstehenden Unterdruckes (Atemwiderstand) G = Gewicht der Membrane und deren Verstärkungen + gilt für die Lage der Lungenautomaten beim Rückenschwimmen - gilt für die normale Schwimmlage b) y = k•x k = Federkonstante x = Federhub Die Gleichung 1 sieht nach dem Einsetzen so aus: (fm•p+-G)•a-k•x•b=0 2. Die Momentanbedingung zum Drehpunkt des unteren (sekundären) Hebels Gleichung 2: x•c-y•d = 0 x = F1 • (pR - p) F1 = Düsenquerschnitt (d = 3 mm) pR = Druck im Reduzierventil p = Druck im Lungenautomaten Gleichung 2 nach dem Einsetzen (pR•p)•c-k•x•d = 0 Die Gleichungen 1 und 2 sind die Grundgleichungen für die Berechnung der zweiten Stufe dieses Lungenautomaten. Aus der Analyse dieser Gleichungen gehen folgende Grundsätze hervor: 1. möglichst leichte und nachgiebige Membrane, 2. großer Membranendurchmesser (und möglichst große, wirksame Fläche, d. Red.), 3. großes Übersetzungsverhältnis, 4. die Hebel ausgewogen konstruieren. Diese Grundsätze sind natürlich durch die Festigkeit der Bestandteile und die Ausmaße der Lungenautomatik beschränkt. Die praktische Ausführung unseres Zweistufenreglers Einschlauchregler (Bild 1 und 2) Das Ausatemventil ist direkt in der Membranenverstärkung untergebracht, die Membrane wird durch den Verschlußring gehalten. Bei dieser Ausführung kommt der Gebrauch eines Injektors auf Grund der Richtungsänderung des Luftstroms (Ein- und Ausatmung geht durch einen Schlauch) nicht in Betracht. Zweischlauchregler mit Injektor (Bild 3) Im Mundstück ist der Einatmungsschlauch durch ein Rückschlagventil gesichert. Das Niederdruckventil der zweiten Stufe weist eine Bohrung (3,5 mm 0) mit der Funktion eines Injektors auf, der Verschlufikörper ist entsprechend hergerichtet (siehe Bild 3). Das Ausatemventil befindet sich im Gehäuseoberteil über der Membrane, die durch den Verschlußring gehalten wird. Als Material benutzten wir ausschließlich Messing, nur die Federn sind aus Stahl (zwei im Reduzierventil und eine in der zweiten Stufe). Diese Stahlfedern sowie alle äußeren Flächen des Lungenautomaten ließen wir verchromen. Dadurch erlangten wir Korrosionsbeständigkeit und gutes Aussehen. Die einzelnen Bestandteile sind so dimensioniert, daß die Möglichkeit mechanischer Störungen oder Deformationen ausgeschlossen ist. Fast alle Bestandteile lassen sich auf der Drehbank und auf der Bohrmaschine fertigen, einige Flächen müssen gefräst werden. Das Hebelsystem besteht aus Messingblech. Nicht zerlegbare Verbindungen haben wir hartverlötet. Der Regler läßt sich durch Änderung der Federvorspannung in der 1. oder 2. Stufe regulieren. In der 1. Stufe ist eine Einrichtung zum Ändern des Luftdruckes (von 0 bis 9 atü) vorhanden. Zum Schluß möchten wir noch erwähnen, daß wir beide Varianten unseres Lungenautomaten zwei Jahre unter verschiedenen Bedingungen benutzt haben und sagen können, daß sie sich bewährt haben. Obzwar unser Regler eine stark gegliederte Form hat, glauben wir, daß er sowohl von der funktionellen als auch der ästhetischen Seite aus die Forderungen selbst anspruchsvoller Tauchsportler befriedigt. |
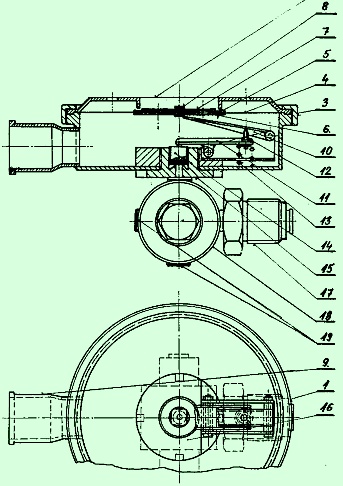 Bild 1: Zusammenstellung des Zweistufenreglers (1. Variante:Ein- und Ausatmung durch einen Schlauch). 1 – Gehäuseunterteil, 2 – Gehäuseoberteil, 3 – Verschlußring, 4 – Membrane, 5 und 6 – Verstärkung der Membrane – gleichzeitig Ausatemventil, 7 – Membrane des Ausatemventils, 8 – Befestigungsschrauben des Ausatemventils, 9 – Ein- und Ausatemstutzen, 10 – Primärhebel, 11 – Sekundärhebel, 12 – Stellschraube, 13 – Feder, 14 – Verschlußkörper, 15 – Hauptstück, 16 – Mutter mit Lagerbock (sekundär), 17 – Schlauchanschluß, 18 – Reduzierventil KP-14, 19 – Verschlußschrauben |
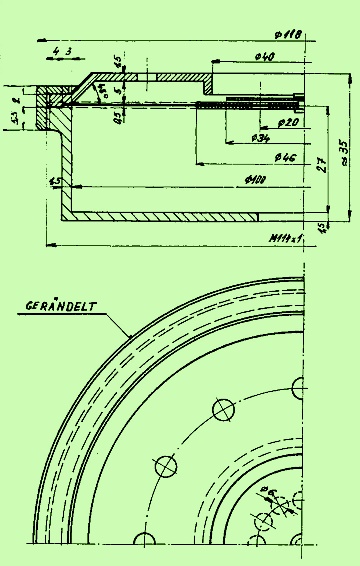 Bild 2: Zusammenstellung des Gehäuseunter- und -oberteils und der Membrane mit Ausatemventil. Die Ausatmung durch die Membrane scheint eine geeignete Lösung zu sein, da der Ausatemwiderstand minimal ist. a = 44 mm c = 14 mm b = 8 mm d = 22 mm |
|
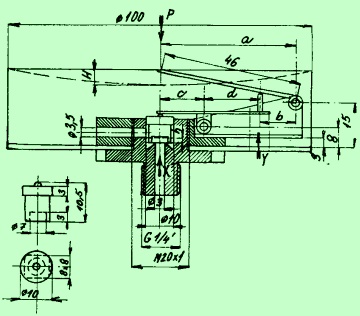 Bild 3: Die Einrichtung des Hebelmechanismus in der zweiten Stufe mit der Benutzung des Injektors (Variante 2) und der dadurch hervorgehenden Änderung des Verschlußkörpers. Die Ausatmung verläuft normal über der Membrane ins Wasser. |
|