Trotz mehrerer Ansätze hat sich leider, wohl wegen der Sicherheitsaspekte
und des Haftungs- und Zertifizierungswahns, noch kein open source computer
durchgesetzt.
Aber vielleicht wird der rechts ja was und
bleibt bezahlbar!
Ein paar Jahre später:
Ja, inzwischen hat diese Typ-Familie eine ziemliche Verbreitung gefunden. Ich habe
allerdings den (wirklich subjektiven) Eindruck, dass die Möglichkeiten der open source
nicht soo extensiv genutzt werden. Der Preis ist hoch geblieben, was ich angesichts der
Entwicklungskosten für so ein Einzweckgerät auch verstehe.
Vor einigen Jahren hatte ich
hier auch geschrieben:
Wünschenswert wäre doch für die (paar?) Spinner unter den Tauchern, die immer alles
verstehen und selbst bestimmen wollen, was sie tun, eine robuste, großzügig
dimensionierte, mit entsprechenden Sensoren ausgestattete und frei programmierbare
Hardware, die man u.a. mit Dekoalgorithmen beschäftigen könnte.
Vielleicht sollte man einen normalen Billig-PDA (privat digital assistant, wie die Dinger
damals hießen) druckdicht einpacken und ihm über USB ein Bedien- und Sensorteil
verpassen???
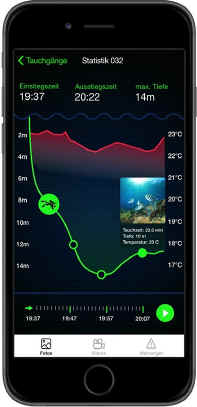
Genau das, oder
eher ein guter Ansatz dazu, ist jetzt (2012)
passiert. Das weit verbreitete iPhone,
ein PDA mit großen Möglichkeiten, vor allem durch die Einbindbarkeit individuell
programmierbarer Apps ist von einigen Firmen (z.B. igills und ScubaCapsule in ein wasserdichtes Gehäuse gesteckt und mit Druck- und
Temperatur-Sensoren versehen worden.
Neben den Apps für TC-Aufgaben mit sehr guter Anzeige auf dem Display laufen z.B. auch
Kamera und Video-Recorder mit externem Blitz/Beleuchtung, und an der Oberfläche kann man
im Notfall auch telefonieren.
Diese Entwicklung halte
ich nicht für eine Spielerei, sondern ingenieurmäßig, vom Kosten/Nutzen-Aspekt und
schließlich von der Nutzerfreundlichkeit her langfristig für den engagierten
Sporttaucher vernünftiger als eine teure Spezialentwicklung.
Hier sind nur die spezifischen Sensoren hinzuzufügen, der Gehäusebau ist mit den
Erfahrungen aus dem UW-Digital-Kamera-Bau nicht mehr problematisch, die
Apps-Programmierung ist gut dokumentiert und weit verbreitet. Außerdem ist der Nutzer den
Umgang mit seinem PDA-Liebling, pardon, Tablet oder Smartphone, gewohnt.
Die Gefahr des Pfuschs bei den sicherheitsrelevanten Apps besteht genauso wie im open
source project. In Eigenverantwortung muss man entscheiden, ob man die App des
vertrauenswürdigen Herstellers oder des Kumpels von nebenan einsetzt.
Ähnlich wie bei den meisten Digitalkameras wird das Gehäuse für die nächste Version
u.U. nicht mehr passen.
Aber muss man diese neue Version wirklich haben, und vielleicht kann man die alte Version
einfach einige Zeit noch für diesen Zweck belassen, statt sie dem Recycling zuzuführen?
Für das "alte" Smartphone erzielt man ohnehin keinen hohen Wiederverkaufspreis
mehr.
2019 scheinen sich diese an sich positiven
Entwicklungen schon wieder erledigt zu haben, websites nicht erreichbar!
Wenn nur das Gehäuse mit der Zusatzelektronik viel mehr kostet als ein guter TC
(ScubaCapsule 2016 um 1.000€, 2019 bei Amaz... 850 €), ist das auch nicht
verwunderlich :-(
Aber so ist das mit den Spezialentwicklungen, wobei hier ja schon viel weniger
"spezial" dabei ist, als bei einem Einzweck-Tauchcomputer.
Ich als kleiner Elektronik-Entwickler
würde das ja wegen des Versionswahnsinns und der Vielfalt der Smartphone-Typen anders
machen:
- Gehäuse groß genug für alle zu erwartenden neuen angemessenen
Smartphone-Versionen ohne jegliche Durchbrüche für Buchsen und Taster,
- enthaltene oder externe Box, die alle Sensoren und ev. Zusatzelemente enthält
und die Werte drahtlos zum Phone übertragen kann, Beim HD-Sensor an der
Flasche geht das ja auch.
- Bedienung möglichst komplett über den Touchscreen,
- bei neuer Version nur Änderungen in der App erforderlich.
Die Gehäuseproduktion könnte über längere Zeit stabil und wegen der höheren
Stückzahl deutlich preiswerter sein. Warum soll das nicht gehen?
Und die chinesischen Entwickler aus Zhuhai haben schnell gehandelt
und 2023 das DiveVolk-Gehäuse entwickelt. Man
könnte meinen, sie hätten meine obigen Vorschläge angenommen, Aber so vermessen bin ich
nicht.
Sie haben's einfach so gemacht, weil es vernünftig ist!
- passfähig für viele Smartphones
von Intel, Samsung, Huawai,...
ev. über Adapter,
- keine Durchführungen im Gehäuse, Bedienung nur über Touchscreen,
auch unter Wasser, Einsatz bis 60 m Tiefe,
- volle Telefonnutzbarkeit über Wasser,
- viel Zubehör gegen Aufpreis, keine Beschränkungen bei Apps,
- alles Weitere in der Beschreibung des Teils bei den Anbietern,
- Preis ab 249 Euro (02/2024), in D verfügbar,
Mal sehen, was draus wird? |




|



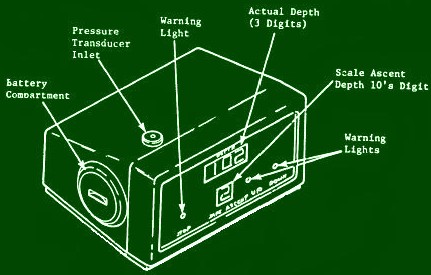
 DCIEM
Mark
DCIEM
Mark



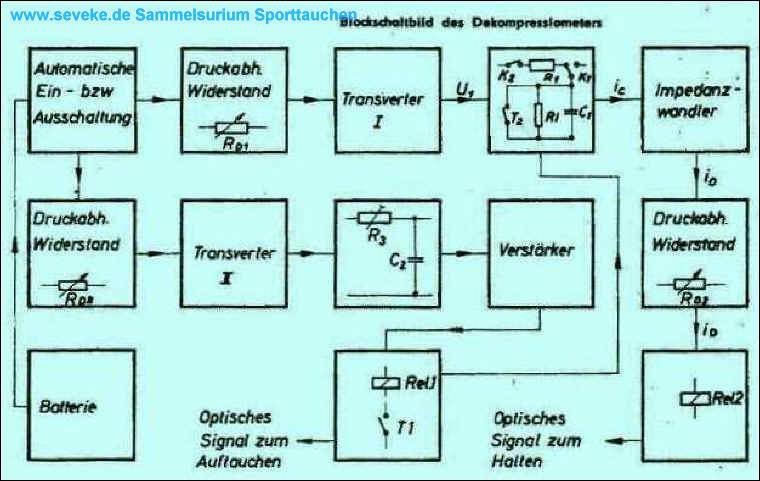
 Der erste elektrischer Analog-Rechner als
Decomputer war 1963 der Tracor
Der erste elektrischer Analog-Rechner als
Decomputer war 1963 der Tracor 


 1981 kehrte dann NewTec, wie KyberTec inzwischen hieß, wieder zur
Echtzeit-Dekomodell-Rechnung (Kidd-Stubbs) zurück und brachte den CyberDiverIII heraus, der ansonsten
wie der CyberDiver II war.
1981 kehrte dann NewTec, wie KyberTec inzwischen hieß, wieder zur
Echtzeit-Dekomodell-Rechnung (Kidd-Stubbs) zurück und brachte den CyberDiverIII heraus, der ansonsten
wie der CyberDiver II war.
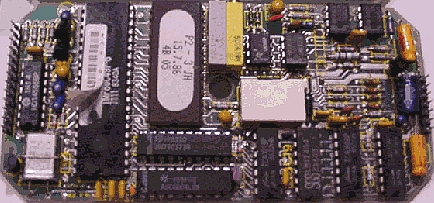
 Ebenfalls 1983 taten sich die beiden Firmen US Divers und Oceanic zusammen, weil sie
wohl nicht die letzen ohne TC sein wollten ;-)) und investierten etwa 1,5 Millionen Dollar
in die Entwicklung eines Tauchcomputers. Er erschien allerdings erst 1987 auf dem Markt,
natürlich unter zwei verschiedenen Namen, DataScan 2 von US Divers und DataMaster II von Oceanic.
Ebenfalls 1983 taten sich die beiden Firmen US Divers und Oceanic zusammen, weil sie
wohl nicht die letzen ohne TC sein wollten ;-)) und investierten etwa 1,5 Millionen Dollar
in die Entwicklung eines Tauchcomputers. Er erschien allerdings erst 1987 auf dem Markt,
natürlich unter zwei verschiedenen Namen, DataScan 2 von US Divers und DataMaster II von Oceanic.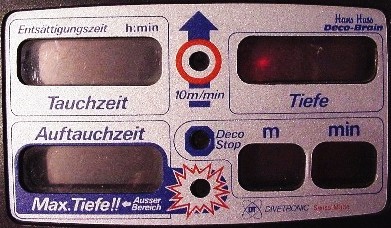





{kind=link}
{kind=link}